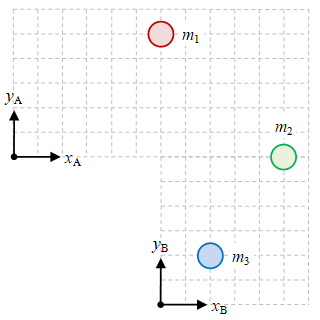
Gambar 1. Tiga titik massa, $m_1$, $m_2$, dan $m_3$, yang posisinya dapat dinyatakan dengan dua kerangka acuan berbeda, $\rm A$ dan $\rm B$.
Dengan kerangka acuan merupakan kumpulan sumbu-sumbu dari mana posisi dan gerak suatu benda dideskripsikan, posisi perlu dinyatakan dengan jelas dan pasti relatif terhadap suatu kerangka acuan yang memudahkan [1]. Kerangka acuan yang digunakan dalam dinamika dikenal pula sebagai sistem koordinat, dengan sumbu-sumbunya bersumber dari suatu titik yang disebut origin [2].
Pemilihan keranca acuan tidaklah unik dan terdapat tak-hingga pilihan yang mungkin [3]. Bila kerangka acuan tidak unik dan dapat dipilih, dengan memperhatikan bahwa kerangka acuan yang dipilih sebaiknya memudahkan pemecahanan permasalahan, maka posisi suatu benda juga akan menjadi tidak unik karena bergantung pada kerangka acuan dari mana posisi benda dideskripsikan.
Pada gambar berikut terdapat tiga titik massa $m_1$, $m_2$, dan $m_3$, yang posisinya dapat dinyatakan dengan menggunakan kerangka acuan $\rm A$ $(x_{\rm A}, y_{\rm A})$ atau kerangka acuan $\rm B$ $(x_{\rm B}, y_{\rm B})$. Satu kotak bernilai satu satuan baik pada arah $x$ maupun $y$ untuk kedua kerangka acuan.
Gambar 1. Tiga titik massa, $m_1$, $m_2$, dan $m_3$, yang posisinya dapat dinyatakan dengan dua kerangka acuan berbeda, $\rm A$ dan $\rm B$.
Menurut kerangka acuan $\rm A$ posisi $m_1$ diberikan oleh koordinat $(6, 5)$, sedangkan menurut kerangka acuan $\rm B$ posisi $m_1$ diberikan oleh koordinat $(0, 11)$.
vector 2d intro • meter • length • relative position • displacement 2d • displacement 1d • distance 2d • distance 1d